CRS III 结构的离散分析 Discrétisation des structures
结构的离散分析:目的与原理 Analyse discrète des structures : objectif et principe
目的
- 寻找近似解
- 分析离散模型
- 推广到无穷元素
原理
实际上,即使我们拥有运动的确切方程,找到解析解也并非总是可能的,因此需要使用近似方法来找到解。我们将在本章介绍的Rayleigh-Ritz方法就是其中之一。
离散近似解
我们寻找一种如下所示的离散近似解:
\[ \mathrm{u} \mapsto \overline{\mathrm{u}}=\sum_{\mathrm{i}=1}^{\mathrm{N}} \underbrace{\lambda_{\mathrm{i}}(\mathrm{t}) \cdot \psi_{\mathrm{i}}(\overrightarrow{\mathrm{x}})}_{\text {solution discrète }} \]
其中,\(\left\{\lambda_i\right\}_{i=1, N}\)表示解的加权系数,\(\left\{\psi_i\right\}_{i=1, N}\)表示解的运动学允许空间表示函数。
如此,问题的弱表述或强表述的方程和表达可以用λ来表示。然而,为了找到解,弱形式的表达更适用,它基于泛函的最小化。
\[ \underbrace{\delta \int_{\mathrm{t}_1}^{\mathrm{t}_2} \mathrm{~L}\left(\lambda_{\mathrm{i}}, \dot{\lambda}_{\mathrm{i}}, \ldots\right) \mathrm{dt}=0}_{\text {condition de minimisation }} \ \ \ \ \ \forall \delta \lambda_{\mathrm{i}} \]
实践 Mise en oeuvre
拉伸-压缩梁的形变能量的情况
我们已经讨论过,拉伸-压缩梁的形变能量:
\[ V_{\text {int }}=E_{\text {déformation }}=\frac{1}{2} \int_0^L E S\left(\frac{\partial u}{\partial x}\right)^2 d x=\frac{1}{2} \int_0^L E S\left(\frac{\partial u}{\partial x}\right)\left(\frac{\partial u}{\partial x}\right) d x \]
将离散近似解替换进去:
\[ \begin{aligned}\mathrm{V}_{\text {int }} & =\frac{1}{2} \int_0^L E S\left(\sum_{i=1}^N \lambda_i \cdot \frac{\partial \psi_i}{\partial x}\right)\left(\sum_{i=1}^N \lambda_i \cdot \frac{\partial \psi_i}{\partial x}\right) d x \\& =\frac{1}{2} \sum_{i=1}^N \sum_{j=1}^N \lambda_i \int_0^L E S \frac{\partial \psi_i}{\partial x} \frac{\partial \psi_j}{\partial x} d x \lambda_j\end{aligned} \]
只有\(ψ\)的导数被积分,我们用对称双线性函数表示之:
\[ \begin{aligned}V_{\text {int }} & =\frac{1}{2} \sum_{i=1}^N \sum_{j=1}^N \lambda_i \cdot a\left(\psi_i, \psi_j\right) \lambda_j \\& =\frac{1}{2}\left[\lambda_i\right]\left[a\left(\psi_i, \psi_j\right)\right]\left[\lambda_j\right]\end{aligned} \]
最终势能表现为关于\(\lambda\)的二次型。\(a(u,v)\) 可以直接从强表述方程\(Au = -\rho \ddot u\)的第一项得到,但是以变分形式出现,我们将其泛化为:
\[ \mathrm{K}_{\mathrm{ij}}=\mathrm{a}\left(\psi_{\mathrm{i}}, \psi_{\mathrm{j}}\right) \]
从而得到:
\[ \mathrm{V}_{\text {int }}=\mathrm{E}_{\text {déformation }}=\frac{1}{2}\left[\lambda_{\mathrm{i}}\right]\left[\mathrm{K}_{\mathrm{ij}}\right]\left[\lambda_{\mathrm{j}}\right] \]
拉伸-压缩梁的动能的情况
然后考虑动能:
\[ E_C=\frac{1}{2} \int_0^L \rho S\left(\frac{\partial u}{\partial t}\right)^2 d x=\frac{1}{2} \int_0^L E S\left(\frac{\partial u}{\partial t}\right)\left(\frac{\partial u}{\partial t}\right) d x \]
替换离散解:
\[ \begin{aligned}E_c& =\frac{1}{2} \int_0^L E S\left(\sum_{i=1}^N \dot{\lambda}_i \cdot \psi_i\right)\left(\sum_{i=1}^N \dot{\lambda}_i \cdot \psi_i\right) d x \\& =\frac{1}{2} \sum_{i=1}^N \sum_{j=1}^N \dot{\lambda}_i \int_0^L \rho S \psi_i \psi_j d x \dot{\lambda}_j\end{aligned} \]
进一步提取双线性函数得到:
\[ \begin{aligned}E_c & =\frac{1}{2} \sum_{i=1}^N \sum_{j=1}^N \dot{\lambda}_i \cdot\left(\rho \psi_i, \psi_j\right) \dot{\lambda}_j \\ & =\frac{1}{2}\left[\dot{\lambda}_i\right]\left(\rho \psi_i, \psi_j\right)\left[\dot{\lambda}_j\right] \end{aligned} \]
\((\rho u,v)\) 可以直接从强表述方程\(Au = -\rho \ddot u\)的第二项得到,但是以变分形式出现。我们将其泛化为:
\[ \mathrm{M}_{\mathrm{ij}}=\left(\rho \psi_{\mathrm{i}}, \psi_{\mathrm{j}}\right) \]
如此动能被表示为:
\[ E_C=\frac{1}{2}\left[\dot{\lambda}_i\right]\left[M_{i j}\right]\left[\dot{\lambda}_j\right] \]
拉伸-压缩梁的有势力做功的情况
考虑有势力做功做功:
\[ \int_{\Omega} \vec{f} \cdot \vec{u} d \Omega=-V_{\text {ext }} \]
在垂直放置的受重力的直梁的情况下,有:
\[ \begin{aligned} -V_{e x t} & =\int_0^L S f \cdot u d x=\int_0^L S f \cdot \sum_{i=1}^N \lambda_i \cdot \psi_i d x \\ & =\sum_{i=1}^N \lambda_i \cdot \int_0^L S f \psi_i d x \end{aligned} \]
设\(\mathrm{f}_{\mathrm{i}}=\int_0^L \mathrm{Sf} \psi_{\mathrm{i}} \mathrm{dx}\),可将外力简化为线性项:
\[ -V_{ext} = ={ }^{\top}\left[f_i\right]\left[\lambda_i\right] \]
拉伸-压缩梁的非有势力做功的情况
考虑非有势力做功,考虑作用在\(x = L\)点的拉力,有:
\[ \begin{aligned} \overrightarrow{\mathrm{F}} \cdot \overrightarrow{\mathrm{U}}(\mathrm{L}) & =\mathrm{F} \cdot \mathrm{u}(\mathrm{L}) \\ & =\mathrm{F} \cdot \sum_{\mathrm{i}=1}^{\mathrm{N}} \lambda_i(\mathrm{t}) \cdot \psi_{\mathrm{i}}(\mathrm{L}) \end{aligned} \]
设\(F_i=F \psi_i(L)\),可将非有势力做功简化为:
\[ W =^{\top}\left[F_i\right]\left[\lambda_i\right] \]
考虑非有势力做功,考虑作用在\(x = L\)点的力矩:
\[ \begin{aligned} M \cdot \theta(L, t) & =\left.M \cdot \frac{\partial u(x, t)}{\partial x}\right|_{x=L} \\& =\left.M \cdot \sum_{i=1}^N \lambda_i(t) \cdot \frac{\partial \psi_i(x, t)}{\partial x}\right|_{x=L}\end{aligned} \]
设\(M_i=\left.M \frac{\partial \psi_i}{\partial x}\right|_{x=L}\),可将其简化为线性项:
\[ M \cdot \theta(L, t)=^{\top}\left[M_i\right]\left[\lambda_i\right] \]
不论是应用于接触力\(F\)、局部力矩\(M\)还是接触力的部分\(p\)。我们都可以从外力的工的表达式出发:
$$
\[\begin{aligned} W_{e x t} & =\int_{\partial \Omega_F} \overrightarrow{\mathrm{t}} \cdot \mathrm{Dud} \partial \Omega_{\mathrm{F}}=\sum_{\mathrm{i}=1}^{\mathrm{N}} \int_{\partial \Omega_{\mathrm{F}}} \overrightarrow{\mathrm{t}} \cdot \mathrm{D} \psi_{\mathrm{i}} \mathrm{d} \partial \Omega_{\mathrm{F}} \cdot \lambda_{\mathrm{i}} \end{aligned}\]$$
从而将其简化为:
\[ W_{ext} =^{\top}\left[F_i\right] \cdot\left[\lambda_i\right] \]
应用Hamilton原理
L组成部分的变分
- 动能:
\[ \begin{aligned} \delta \mathrm{E}_{\mathrm{C}} & =\delta\left(\frac 1 2{ }^{\mathrm{T}}\left[\dot{\lambda}_{\mathrm{i}}\right]\left[\mathrm{M}_{\mathrm{ij}}\right]\left[\dot{\lambda}_{\mathrm{j}}\right]\right) \\ & ={ }^{\mathrm{T}}\left[\dot{\lambda}_{\mathrm{i}}\right]\left[\mathrm{M}_{\mathrm{ij}}\right]\left[\delta \dot{\lambda}_{\mathrm{j}}\right] \end{aligned} \]
势能
\[ \begin{aligned}\delta V & =\delta V_{\text {ext }}+\delta V_{\text {int }} \\& \left.={ }^{\top}\left[\lambda_i\right]\left[\mathrm{K}_{i j}\right] \delta \lambda_j\right]^{\top}\left[f_i\right]\left[\delta \lambda_j\right]\end{aligned} \]
外力做功
\[ \delta W_{\text {ext }}={ }^{\top}\left[F_i\right]\left[\delta \lambda_j\right] \]
代入方程
\[ \delta\int_{t_1}^{t_2}Ldt = \int_{t_1}^{t_2}\left[{}^T[\dot \lambda_i][M_{ij}][\delta\dot \lambda_j]-{}^T[\lambda_i][K_{ij}][\delta\lambda_j]+{}^T[f_i][\delta \lambda_j]+{}^T[F_i][\delta \lambda_j]\right]dt \]
对第一项分布积分得:
\[ \delta\int_{t_1}^{t_2}Ldt = \left[{}^T[\dot \lambda_i][M_{ij}][\delta \lambda_j]\right]_{t_1}^{t_2}-\int_{t_1}^{t_2}\left[{ }^{\top}[\ddot \lambda_i][M_{i j}]+{ }^{\top}[ \lambda_i][K_{i j}]-{ }^{\top}[f_i]-{ }^{\top}[F_i]\right][\delta\lambda]dt \]
根据\(\left.\delta \lambda_{\mathrm{i}}\right|_{\mathrm{t}_1}=0 \ \&\left.\delta \lambda_{\mathrm{i}}\right|_{\mathrm{t}_2}=0\),第一项为0,故得:
\[ [\mathrm{M}_{\mathrm{ij}}][\ddot{\lambda}_{\mathrm{i}}]+\left[\mathrm{K}_{\mathrm{ij}}\right][\lambda_{\mathrm{i}}]=[\mathrm{f}_{\mathrm{i}}]+[\mathrm{F}_{\mathrm{i}}] \]
计算离散模型 Calcul modal sous forme discrète
离散模态
假设\([\lambda_i]\)是\([\mathrm{M}_{\mathrm{ij}}][\ddot{\lambda}_{\mathrm{i}}]+\left[\mathrm{K}_{\mathrm{ij}}\right][\lambda_{\mathrm{i}}]=[\mathrm{f}_{\mathrm{i}}]+[\mathrm{F}_{\mathrm{i}}]\)的解,则引入模态之后,有离散模态\([X_i]_n\)是:
\[ \left(-\bar{\omega}_n^2\left[\mathrm{M}_{\mathrm{ij}}\right]+\left[\mathrm{K}_{\mathrm{ij}}\right]\right)\left[\mathrm{X}_{\mathrm{i}}\right]_{\mathrm{n}}=[0] \]
的解。这些特征向量构成了我们在上一章中突出的特征模的近似形式。
正交化和归一化
为了找到上述方程的非零解,我们必须要求矩阵非满秩:
\[ \operatorname{det}\left(\left[\mathrm{K}_{\mathrm{ij}}\right]-\omega^2\left[\mathrm{M}_{\mathrm{ij}}\right]\right)=0 \]
这个方程的解即为与特征向量相联系的特征频率。
这些解有着与前一张的连续模态相同的性质:
\[ \begin{aligned} & { }^{\mathrm{T}}\left[\mathrm{X}_{\mathrm{i}}\right]_{\mathrm{n}}\left[\mathrm{M}_{\mathrm{ij}}\right]\left[\mathrm{X}_{\mathrm{j}}\right]_{\mathrm{m}}=\delta_{\mathrm{nm}} \\ & { }^{\mathrm{T}}\left[\mathrm{X}_{\mathrm{i}}\right]_{\mathrm{n}}\left[\mathrm{K}_{\mathrm{ij}}\right]\left[\mathrm{X}_{\mathrm{j}}\right]_{\mathrm{m}}=\bar{\omega}_{\mathrm{n}} \bar{\omega}_{\mathrm{m}} \delta_{\mathrm{nm}} \end{aligned} \]
对应公式:
\[ \begin{aligned}&\left(\rho x_n, x_p\right)=\delta_{nm}\\&a\left(x_n, x_p\right)=\omega_n \omega_m\delta_{nm}\end{aligned} \]
模态基
特征向量组成一组正交归一化的基,我们可以进行坐标转换:
\[ \left[\lambda_i\right]=\left[\left[x_i\right]\right]\left[q_i\right] \]
代入之前的公式得:
\[ [\mathrm{M}] \mathrm{X} \ddot{\mathrm{q}}+[\mathrm{K}] \mathrm{Xq}=[\mathrm{f}]+[\mathrm{F}] \]
简化公式:
\[ { }^{\top} X[M] X [\omega^2_i]q+{ }^{\top} X[K] X q={ }^{\top} X[f]+{ }^{\top} X[F] \]
由于\(X\)是特征向量,结合正交化信息,得:
\[ \left[\begin{array}{ccc}\omega_1^2 & 0 & 0 \\0 & \ddots & 0 \\0 & 0 & \omega_N^2\end{array}\right]\left[\begin{array}{c}\mathrm{q}_1 \\\vdots \\\mathrm{q}_N\end{array}\right]+\left[\begin{array}{ccc}1 & 0 & 0 \\0 & \ddots & 0 \\0 & 0 & 1\end{array}\right]\left[\begin{array}{c}\ddot{\mathrm{q}}_1 \\\vdots \\\ddot{\mathrm{q}}_N\end{array}\right]=\left[\begin{array}{c}\widetilde{f}_1 \\\vdots \\\widetilde{f}_N\end{array}\right]+\left[\begin{array}{c}\widetilde{F}_1 \\\vdots \\\widetilde{F}_N\end{array}\right] \]
最终得到二阶微分方程:
\[ \ddot{q}_i+\omega_i^2 q_i=\widetilde{f}_i+\widetilde{F}_i \]
阻尼
根据Basile的假设,包含阻尼的微分方程可以写作:
\[ \ddot{\mathrm{q}}+R \dot{\mathrm{q}}+\Omega^2 \mathrm{q}_{\mathrm{i}}=\widetilde{\mathrm{f}}+\widetilde{\mathrm{F}} \]
其中,\(R\)是对角矩阵
在曲梁问题上应用Rayleigh- Ritz方法
运动方程和边界条件
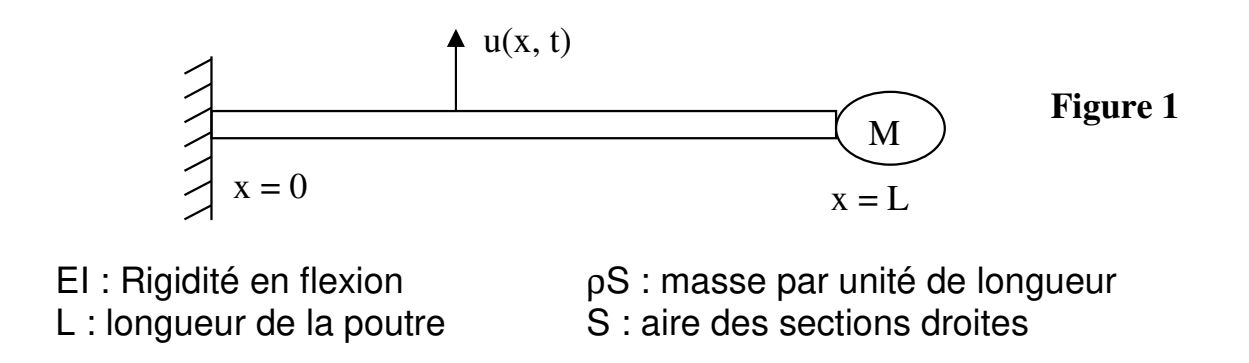
由之前的例子,已知运动方程和边界条件:
$$ \[\begin{align} &\frac{\partial^2}{\partial x^2}\left(E I \frac{\partial^2 u}{\partial x^2}\right)=-\rho S \frac{\partial^2 u}{\partial t^2}\\& \left\{\begin{aligned} &u(0, t)=0\\ &\frac{\partial u(0, t)}{\partial x}=0 \\ & \frac{\partial^2 u(L, t)}{\partial x^2}=0 \\ & E I \frac{\partial^3 u(L, t)}{\partial x^3}=M \cdot \frac{\partial^2 u(L, t)}{\partial t^2} \end{aligned}\right. \end{align}\] $$
对于\((2).4\),当\(M\rightarrow \infty\)时,\((2).4\)转化为\(u(L,t) = 0\)。
模态分析
尽管不是本例子的重点,但我们还是简单的回顾模态分析方法。首先研究简谐驻波解:
\[ u = X(x)e^{i\omega t} \]
代入\((1)\)得:
\[ X^{(4)}(x)-\frac{\rho S}{EI}\omega^2X(x) = 0 \]
这个方程的通解为:
\[ X(x) = Acos(kx)+Bsin(Kx)+Ccosh(kx)+Dsinh(kx),\ \ k^4 = \frac{\rho S}{E I} \omega^2 \]
应用边界条件\((2).1\)和\((2).2\),有:
\[ \left\{\begin{aligned}&u(0, t)=0 \\&\frac{\partial u(0, t)}{\partial x}=0\end{aligned}\right.\Rightarrow \left\{\begin{aligned} &A+C= 0\\ &B+D = 0 \end{aligned}\right. \]
得:
\[ \begin{align}X(x) = A(cos(kx)-cosh(x))+B(sin(kx)-sinh(kx))\end{align} \]
将\((3)\)代入\((2).3\)和\((2).4\),有:
\[ \begin{align}\left\{\begin{aligned}& Ak^2(-cos(kx)-cosh(kx))+Bk^2(-sin(kx)-sinh(kx)) = 0 \\& Ak^3(sin(kx)-sin(kx))+Bk^3(-cos(kx)-cosh(kx)) = -M\omega^2X(x) \end{aligned}\right.\end{align} \]
设\(\mu=\frac{M}{\rho S l}\),\((4)\)转化为:
\[ \begin{align}\left\{\begin{aligned}& A(-cos(kx)-cosh(kx))+B(-sin(kx)-sinh(kx)) = 0 \\& A(sin(kx)-sin(kx))+B(-cos(kx)-cosh(kx)) = -\mu k LX(x) \end{aligned}\right.\end{align} \]
可解得:
\[ \begin{align}\left\{\begin{aligned}& B = A\frac{-cos(kx)-cosh(kx)}{sin(kx)+sinh(kx)} \\& \left[1+\frac{1}{\cos (k L) \cdot \cosh (k L)}\right]+\mu \cdot k L \cdot[-\tan (k L)-\tanh (k L)]=0 \end{aligned}\right.\end{align} \]
此时:
\[ X_n = A_n\left[(cos(k_nx)-cosh(k_nx))+\frac{(sin(kx)-sinh(kx))\times(-cos(kx)-cosh(kx))}{sin(k_nx)+sinh(k_nx)}\right] \]
当\(\mu\rightarrow\infty\)时,由\((6)\)有:
\[ -\tan (k_n L)=\tanh (k_n L) \]

当\(\mu\rightarrow0\)时,由\((6)\)有:
\[ \cos (k_n L) \cdot \cosh (k_n L) = -1 \]

基于Rayleigh- Ritz方法分析:\(\mu = 0\)的情况
基于离散方法假设(对应两个模态):
\[ u=\lambda_1 x^2+\lambda_2 x^3 \]
目前系统没有受到外力,所以将其分别代入动能和势能的计算公式中。
离散情况下的动能/势能计算
动能
\[ \begin{aligned}E_c &= \frac 12\int_0^LpS\dot u^2dx = \frac 12\int_0^LpS(\dot \lambda_1x^2+\dot\lambda_2x^3)^2dx\\ &=\frac 1 2 \int_0^L\rho S(\dot\lambda_1^2x^4+\dot\lambda_2^2x^6+2\dot\lambda_1\dot\lambda_2x^5)dx \\ & =\frac{1}{2}\left[\begin{array}{ll} \dot\lambda_1 \dot\lambda_2 \end{array}\right]\left[\begin{array}{ll} \int_0^L \rho S x^4 d x & \int_0^L \rho S x^5 d x \\ \int_0^L \rho S x^5 d x & \int_0^L \rho s x^6 d x \end{array}\right]\left[\begin{array}{l} \dot\lambda_1 \\ \dot\lambda_2 \end{array}\right]\\ & = \frac 12{ }^{\top} \dot{\lambda}[M] \dot{\lambda} \end{aligned} \]
从而得到广义质量矩阵(名称存疑):
\[ [M]=\left[\begin{array}{cc}\frac{\rho S L^5}{5} & \frac{\rho S L^6}{6} \\\frac{\rho S L^6}{6} & \frac{\rho S L^7}{7}\end{array}\right] \]
势能
\[ \begin{aligned}V& = \frac 1 2\int_0^LEI(u^{\prime\prime})^2dx = \frac 1 2\int_0^LEI(4\lambda_1^2+36\lambda_2^2x^2+24\lambda_1\lambda_2x)dx\\ & = \frac{1}{2}\left[\begin{array}{ll} \lambda_1 & \lambda_2 \end{array}\right]\left[\begin{array}{ll} \int_0^L 4 E I d x & \int_0^L 12E I x d x \\ \int_0^L12E I x d x & \int_0^L 36E I x^2 d x \end{array}\right]\left[\begin{array}{l} \lambda_1 \\ \lambda_2 \end{array}\right] \\& = \frac{1}{2}\left[\begin{array}{ll} \lambda_1 & \lambda_2 \end{array}\right]\left[\begin{array}{ll} 4 E I L & 6E I L \\ 6E I L & 12EIL^2 \end{array}\right]\left[\begin{array}{l} \lambda_1 \\ \lambda_2 \end{array}\right]\\&=\frac{1}{2}{ }^{\top} \lambda[K] \lambda \end{aligned} \]
从而得到:
\[ [K]=\left[\begin{array}{cc} 4 E I L & 6 E I L^2 \\ 6 E I L^2 & 12 E I L^3 \end{array}\right] \]
应用哈莫顿原理得到方程
根据哈密顿原理:
\[ \begin{align}\delta\int_{t_1}^{t_2}(E_c-V+W_{ext})dt = 0 \end{align} \]
假设\(\mu = 0\),\(W_{ext} = 0\),展开\((7)\):
\[ \int_{t_1}^{t_2}\left[{ }^T\left[\dot{\lambda}_i\right]\left[M_{i j}\right]\left[\delta \dot{\lambda}_j\right]-{ }^T\left[\lambda_i\right]\left[K_{i j}\right]\left[\delta \lambda_j\right]\right] d t = 0 \]
对第一项应用分部积分,消除变分项中的微分:
\[ \left[{}^T[\dot \lambda_i][M_{ij}][\delta \lambda_j]\right]_{t_1}^{t_2}-\int_{t_1}^{t_2}\left[{ }^{\top}[\ddot \lambda_i][M_{i j}]+{ }^{\top}[ \lambda_i][K_{i j}]\right][\delta\lambda]dt = 0 \]
由条件\(\left.\delta \lambda_{\mathrm{i}}\right|_{\mathrm{t}_1}=0 \ \&\left.\delta \lambda_{\mathrm{i}}\right|_{\mathrm{t}_2}=0\),第一项等于0,从而得:
\[ \begin{align}[M] \ddot{\lambda}+[K] \lambda=0\end{align} \]
引入简谐假设求解方程
基于简谐假设:
\[ X_n = \left[\begin{array}{l} \lambda_1 \\ \lambda_2 \end{array}\right]=\left[\begin{array}{l} \Lambda_1 e^{i \omega t} \\ \Lambda_2 e^{i \omega t} \end{array}\right]=\left[\begin{array}{l} \Lambda_1 \\ \Lambda_2 \end{array}\right] e^{i \omega t} \]
\((8)\)式写作:
\[ \begin{align}-\omega_n^2[M]\left[X_n\right]+[K]\left[X_n\right]=0\end{align} \]
\[ [K]-\omega_n^2[M]\left[\begin{array}{l} \Lambda_1 \\ \Lambda_2 \end{array}\right]=\left[\begin{array}{cc} 4 E I L-\omega_n^2 \frac{\rho S L^5}{5} & 6 E I L^2-\omega_n^2 \frac{\rho S L^6}{6} \\ 6 E I L^2-\omega_n^2 \frac{\rho S L^6}{6} & 12 E I L^3-\omega_n^2 \frac{\rho S L^7}{7} \end{array}\right]\left[\begin{array}{l} \Lambda_1 \\ \Lambda_2 \end{array}\right]=[0] \]
为了不得到零解,行列式\(det([K]-\omega^2[M]) = 0\),这意味着\((9)\)式只能提供一个方程,为了方便计算,我们取:
\[ \begin{aligned} & {\left[4 E I L-\omega_n^2 \frac{\rho S L^5}{5}\right] \Lambda_1+\left[6 E I L^2-\omega_n^2 \frac{\rho S L^6}{6}\right] \Lambda_2=0} \\\Leftrightarrow & \Lambda_2=\left[4 E I L-\omega_n^2 \frac{\rho S L^5}{5}\right] /\left[6 E I L^2-\omega_n^2 \frac{\rho S L^6}{6}\right] \Lambda_1 \end{aligned} \]
从而得到一组与\(\omega_n\)相关的向量\(X_n\)。
正交性
从\((9)\)式还可以证明这些向量之间的正交性:
\[ \begin{aligned}& -\omega_1^2{ }^T\left[X_2\right][M]\left[X_1\right]+{ }^T\left[X_2\right][K]\left[X_1\right]=0 \\& -\omega_2{ }^2\left[X_1\right][M]\left[X_2\right]+{ }^T\left[X_1\right][K]\left[X_2\right]=0\end{aligned} \]
后续的步骤很简单,在此省略。
基于Rayleigh- Ritz方法分析:\(\mu = \infty\)的情况
在\(\mu = \infty\)的情况下,有初始条件:\(u(L, t)=0\),可以代入\(u\)的离散表示:
\[ u=\lambda_1 L^2+\lambda_2 L^3 = 0 \]
如此即可将\(u\)写做:
\[ u(x, t)=\lambda_2 x^2(L-x) = \lambda_1 x^2\left(1-\frac{x}{L}\right) \]
选择其一即可。此时只能有一个模态,因此:
\[ \begin{aligned}&[K]=4 E I L^3 \quad[M]=\frac{\rho S L^7}{105} \ \ \ \omega^2=\frac{420 E I}{\rho S L^4}\end{aligned} \]