
Chapter 7 Energy-Based Models 基于能量的模型
Chapter 7 Energy-Based Models 基于能量的模型
当前笔记基本没有涉及对代码的讨论。但这个模型跟我的需求在原理上很契合,在进一步尝试时可能会补充这份笔记。

介绍
基于能量的模型是一类广泛的生成式模型。它借鉴了物理系统建模的关键思想,即事件的概率可以使用玻尔兹曼分布来表示。玻尔兹曼分布是一种将实值能量函数归一化到 \([0,1]\)的特定函数。
Long-au-Vin 的长跑队
我们依然从一个小故事开始说起。
基于能量的模型
基于能量的模型使用玻尔兹曼分布来对真实分布建模:
\[ p(\mathrm{x})=\frac{e^{-E(\mathrm{x})}}{\int_{\widehat{\mathrm{x}} \in \mathrm{X}} e^{-E(\widehat{\mathrm{x}})}} \]
其中\(E(x)\)是能量函数。在训练中,更大区别的观察observation给出更高的能量。
为了完成这个建模,我们需要解决两个主要问题:
- 即使我们可以根据观察给出能量,我们也并不清楚如何生成一个低能量的观察
- 我们应该怎么计算分母上的积分
与归一化流不同,我们并不打算找到一种方法能计算出玻尔兹曼分布中的每一项,而是才用近似的方法来避免复杂的运算。
为此,我们使用被称为对比散度contrastive divergence的技术用于训练,郎之万动力学Langevin dynamics的技术用于采样
Energy-Based Models(EMB)
MNIST 数据集
手写数字数据集,过于知名,不再介绍
能量函数
能量函数\(E_\theta(x)\)是一个神经网络结构,其参数被标记为\(\theta\),可以将输入\(x\)转化为一个标量。特殊的是,这种结构使用了Swish激活函数
Swish激活函数
这种激活函数被定义为:
\[ \begin{aligned}\operatorname{swish}(x)&=x \cdot \operatorname{sigmoid}(x)\\&=\frac{x}{e^{-x}+1}\end{aligned} \]
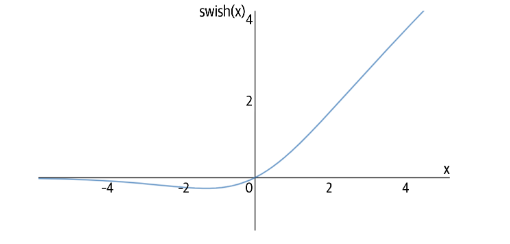
这种函数相当于ReLU激活函数的平滑替代之一,主要用于缓解梯度消失问题。
能量函数层
最终能量函数层被定义为多个卷积和全连接的组合。
1 | _________________________________________________________________ |
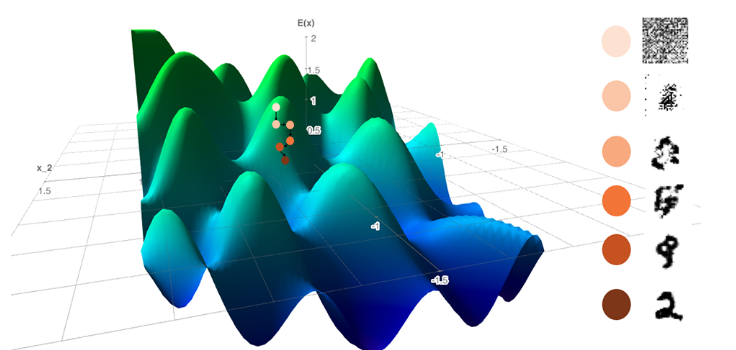
使用郎之万动力学进行采样
这种技术很有意思,该技术利用了我们可以计算能量函数相对于其输入的梯度的事实。
如果我们从样本空间中的随机点开始,并在计算梯度的相反方向上迈出一小步,我们将逐渐减小能量函数。如果我们的神经网络训练正确,那么随机噪声应该转换成类似于我们眼前训练集的观察结果的图像。
训练神经网络时,我们使用反向传播计算损失函数相对于网络参数(即权重)的梯度。然后我们在负梯度方向上少量更新参数,这样经过多次迭代,我们逐渐最小化损失。
通过朗之万动力学,我们保持神经网络权重固定并计算输出相对于输入的梯度。然后我们在负梯度方向上少量更新输入,以便在多次迭代中,我们逐渐最小化输出(能量得分)。
\[ x^k=x^{k-1}-\eta \nabla_x E_\theta\left(x^{k-1}\right)+\omega \]
- 添加噪声:在每个步骤中,首先向输入图像添加正态分布的随机噪声,均值为0,标准差为
noise。然后,使用tf.clip_by_value函数将图像的像素值限制在 -1.0 和 1.0 之间。 - 计算梯度:接下来,使用 TensorFlow
的
GradientTape来监视inp_imgs,并计算模型对inp_imgs的输出分数(out_score)。然后,计算out_score对inp_imgs的梯度(grads),并将梯度值限制在 -0.03 和 0.03 之间。 - 更新图像:然后,根据梯度和步长更新
inp_imgs,并再次将像素值限制在 -1.0 和 1.0 之间。
使用对比散度训练
基于对比散度的损失函数
由于能量函数不输出概率,所以我们并不能使用最大似然估计。但我们可以继承这种想法。我们的目的是最小化负似然:
\[ \mathscr{T}=-\mathbb{E}_{x \sim \text { data }}\left[\log p_\theta(\mathbf{x})\right] \]
根据对比散度的一些理论推导,我们可以得到:
\[ \nabla_\theta \mathscr{P}=\mathbb{E}_{x \sim \text { data }}\left[\nabla_\theta E_\theta(\mathbf{x})\right]-\mathbb{E}_{x \sim \text { model }}\left[\nabla_\theta E_\theta(\mathrm{x})\right] \]
我们希望训练模型为真实观察输出大的负能量分数,为生成的假观察输出大的正能量分数,以便这两个极端之间的对比度尽可能大。换句话说,我们可以计算真实样本和假样本能量分数之间的差异,并将其用作我们的损失函数。
同时我们并不真的获得准确的假样本,而是进行若干次郎之万采样程序,运行少量步骤以产生有意义的损失函数。并将这些假的假样本用于下一批的起点,这样我们不需要每次都从噪音开始生成。


