MMC Chapitre 3 完备性方程 Loi de comportement
MMC Chapitre 3 完备性方程 Loi de comportement
方程数量与未知数数量
| Inconnues | ||
|---|---|---|
| \(u_i(\vec{x}, t)\) | déplacements: vecteur | 3 inconnues |
| \(\varepsilon_{i j}\) | déformations: tenseur symétrique | 6 inconnues |
| \(\sigma_{i j}\) | contraintes: tenseur symétrique | 6 inconnues |
| Équations | ||
| \(\varepsilon_{i j}=\frac{1}{2}\left(\frac{\partial u_i}{\partial x_j}+\frac{\partial u_j}{\partial x_i}\right)\) | déformation - déplacement | 6 équations |
| \(\sum_{j=1,2.3} \frac{\partial \sigma_{i j}}{\partial x_j}+\rho f_i=0\) | équation d'équilibre locale | 3 équations |
| \(\sigma_{i j} \leftrightarrow \varepsilon_{i j}\) | loi de comportement | 6 équations |
| Conditions aux limites | ||
| \(\sigma_{i j} n_j=T_i^d\) | \(T_i^d\) efforts donnés sur \(S_D\) | |
| \(u_i=u_i^d\) | \(u_i^d\) déplacements imposés sur \(S_D\) |
虎克定律 Comportement élastique linéaire
弹性刚度矩阵 Matrice de raideur élastique
- 将应力 \(\bar{\sigma}\) 和应变 \(\bar{\varepsilon}\) 表示为一维数组,其中 \(\sigma_{ij}\) 是应力张量的元素, \(\varepsilon_{ij}\) 是应变张量的元素。注意,剪切应变的表示方式是原始值的两倍。
\[ \bar{\sigma}=\left[\begin{array}{l}\sigma_{11} \\\sigma_{22} \\\sigma_{33} \\\sigma_{23} \\\sigma_{13} \\\sigma_{12}\end{array}\right] \quad \bar{\varepsilon}=\left[\begin{array}{c}\varepsilon_{11} \\\varepsilon_{22} \\\varepsilon_{33} \\2 \varepsilon_{23} \\2 \varepsilon_{13} \\2 \varepsilon_{12}\end{array}\right] \ \ avec \ \ \left\{\begin{aligned}&\gamma_{23}=2 \varepsilon_{23} \\ &\gamma_{13}=2 \varepsilon_{13} \\ &\gamma_{12}=2 \varepsilon_{12}\end{aligned}\right. \]
- 表示为胡克定律的形式
\[ \bar{\sigma}=\underline{\underline{A}} \overline{\underline{\varepsilon}} \]
- 其中,\(\underline{\underline{A}}\) 是弹性模量矩阵。这个公式表示了应力和应变之间的线性关系。
\[ \underline{A}=\left[\begin{array}{cccccc}\lambda+2 \mu & \lambda & \lambda & 0 & 0 & 0 \\\lambda & \lambda+2 \mu & \lambda & 0 & 0 & 0 \\\lambda & \lambda & \lambda+2 \mu & 0 & 0 & 0 \\0 & 0 & 0 & \mu & 0 & 0 \\0 & 0 & 0 & 0 & \mu & 0 \\0 & 0 & 0 & 0 & 0 & \mu\end{array}\right] \]
应力和应变张量的关系
- 在以上公式的基础上,得到应力和应变张量的关系
\[ \underline{\underline{\sigma}}=\lambda \operatorname{trace}(\underline{\underline{\varepsilon}}) \underline{\underline{I}}+2 \mu \underline{\underline{\varepsilon}} \Leftrightarrow \sigma_i=\lambda\left(\varepsilon_1+\varepsilon_2+\varepsilon_3\right)+2 \mu \varepsilon_i \]
韧性矩阵 la matrice de souplesse \(\underline{S}=\underline{A}^{-1}\)
\[ \underline{S}=\frac{1}{E}\left[\begin{array}{cccccc}1 & -v & -v & 0 & 0 & 0 \\-v & 1 & -v & 0 & 0 & 0 \\-v & -v & 1 & 0 & 0 & 0 \\0 & 0 & 0 & 2(1+v) & 0 & 0 \\0 & 0 & 0 & 0 & 2(1+v) & 0 \\0 & 0 & 0 & 0 & 0 & 2(1+v)\end{array}\right] \]
应变和应力张量的关系
\[ \underline{\underline{\varepsilon}}=\frac{(1+\nu)}{E} \underline{\underline{\sigma}}-\frac{\nu}{E} \operatorname{trace}(\underline{\underline{\sigma}}) \underline{\underline{I}} \]
二维问题
\[ A=\frac{E}{1-v^2}\left[\begin{array}{ccc}1 & v & 0 \\v & 1 & 0 \\0 & 0 & \frac{1-v}{2}\end{array}\right], \operatorname{avec}\left\{\begin{array}{l}\sigma_{33}=0 \\\sigma_{13}=0 \\\sigma_{23}=0\end{array}\right. \]
\[ A=\left[\begin{array}{ccc}\lambda+2 \mu & \lambda & 0 \\\lambda & \lambda+2 \mu & 0 \\0 & 0 & \mu\end{array}\right] \text {, avec }\left\{\begin{array}{l}u_3=0 \\\varepsilon_{33}=0 \\\varepsilon_{13}=0 \\\varepsilon_{23}=0\end{array}\right. \]
特殊的应力和变形
球形形变的受压的情况
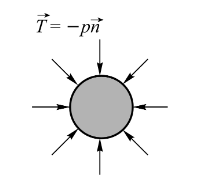
- 应力
\[ \bar{\sigma}=\left[\begin{array}{l}\sigma \\\sigma \\\sigma \\0 \\0 \\0\end{array}\right], \sigma=(3 \lambda+2 \mu) \varepsilon \]
- 应变
\[ \bar{\varepsilon}=\left[\begin{array}{l}\varepsilon \\\varepsilon \\\varepsilon \\0 \\0 \\0\end{array}\right] \]
\[ \underline{\underline{\sigma}}=\left[\begin{array}{ccc}\sigma & 0 & 0 \\0 & \sigma & 0 \\0 & 0 & \sigma\end{array}\right] \quad \underline{\underline{\varepsilon}}=\left[\begin{array}{ccc}\varepsilon & 0 & 0 \\0 & \varepsilon & 0 \\0 & 0 & \varepsilon\end{array}\right] \]
- 可见应变与应力呈线性关系:\(\sigma=(3 \lambda+2 \mu) \varepsilon\)
- 体积相对变化:\(\alpha = \frac{\Delta V}{V}=3 \varepsilon\)
- 此时,可以定义体积压缩模量 module de compressibilité volumique:
\[ \sigma=K \alpha \text { avec } K=\frac{(3 \lambda+2 \mu)}{3} \]
简单剪切情况
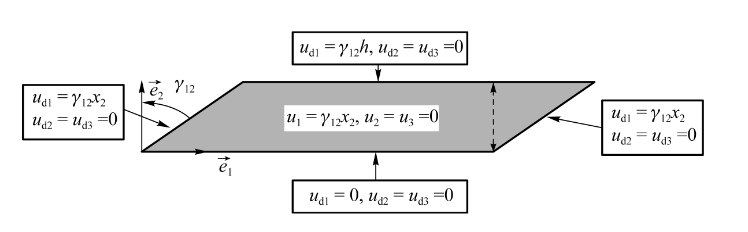
- 注意,这并不是一个平方的板,而是竖放的收到剪切力而变形的薄板,此外,我们讨论的情况是\(\gamma_{12}\)很小的情况
- 在\(\gamma_{12}\)很小的形况下,仅有横向的平移,且大小取决于角速度和坐标\(x_2\),有:
\[ \varepsilon_{12}=\varepsilon_{21}=\frac{1}{2} \frac{\mathrm{d} u_1}{\mathrm{~d} x_2} = \frac 12 \gamma_{12},\ \underline{\underline{\varepsilon}}=\left[\begin{array}{ccc} 0 & \varepsilon_{12} & 0 \\ \varepsilon_{12} & 0 & 0 \\ 0 & 0 & 0 \end{array}\right] \]
- 此时,根据胡可定律\(\underline{\underline{\sigma}}=\lambda \operatorname{trace}(\underline{\underline{\varepsilon}}) \underline{\underline{I}}+2 \mu \underline{\underline{\varepsilon}}\),有:
\[ \sigma_{12}=2 \mu \varepsilon_{12}=\mu \gamma_{12}, \ \underline{\underline{\sigma}}=\left[\begin{array}{ccc} 0 & \sigma_{12} & 0 \\ \sigma_{12} & 0 & 0 \\ 0 & 0 & 0 \end{array}\right] \]
- 此时可以定义剪切模量module de cisaillement
\[ \mu=G \text {. } \]
简单拉伸情况
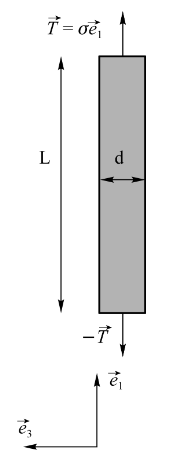
- 这种情况下,应力仅有\(x_1\)上的正应力:
\[ \underline{\underline{\sigma}}=\left[\begin{array}{lll}\sigma & 0 & 0 \\0 & 0 & 0 \\0 & 0 & 0\end{array}\right] \]
- 应变则既有正应变,又有切向应变
\[ \underline{\underline{\varepsilon}}=\left[\begin{array}{ccc}\varepsilon_L & 0 & 0 \\0 & \varepsilon_T & 0 \\0 & 0 & \varepsilon_T\end{array}\right] \]
- 根据胡可定律,得到
\[ \left\{\begin{array} { l } { \sigma = ( \lambda + 2 \mu ) \varepsilon _ { L } + 2 \lambda \varepsilon _ { T } } \\ { 0 = 2 ( \lambda + \mu ) \varepsilon _ { T } + \lambda \varepsilon _ { L } } \end{array} \Rightarrow \left\{\begin{array}{l} \sigma=\frac{\mu(3 \lambda+2 \mu)}{\lambda+\mu} \varepsilon_L \\ \varepsilon_T=-\frac{\lambda}{2(\lambda+\mu)} \varepsilon_L \end{array}\right.\right. \]
- 根据\(E\)和\(v\)的定义:
\[ E=\frac{\mu(3 \lambda+2 \mu)}{\lambda+\mu}, \quad \nu=\frac{\lambda}{2(\lambda+\mu)} \]
- 可以定义拉美系数 coefficients de Lamé
\[ \lambda=\frac{E \nu}{(1+\nu)(1-2 \nu)}, \quad \mu=G=\frac{E}{2(1+\nu)} \]
不同弹性常数之间的关系
| - | \(λ\) | \(μ\) | \(E\) | \(ν\) | \(K\) | \(G\) |
|---|---|---|---|---|---|---|
| \((λ, μ)\) | \(λ\) | \(μ\) | \(μ(3λ+2μ)/(λ+μ)\) | \(λ/2(λ+μ)\) | \((3λ+2μ)/3\) | \(μ\) |
| \((E, ν)\) | \(Ev/(1+ν)(1-2ν)\) | \(E/2(1+ν)\) | \(E\) | \(ν\) | \(E/3(1-2ν)\) | \(E/2(1+ν)\) |
| \((K, G)\) | \((3K-2G)/3\) | \(G\) | \(9KG/(3K+G)\) | \((3K-2G)/2(3K+G)\) | \(K\) | \(G\) |
形变能量
形变能量微元
\[ \mathrm{w}=\frac{1}{2} \bar{\sigma}^T \bar{\varepsilon}=\frac{1}{2} \bar{\varepsilon}^T \underline{\underline{A} \bar{\varepsilon}}=\frac{1}{2} \bar{\sigma}^T \underline{\underline{S}} \bar{\sigma} \Leftrightarrow \frac{1}{2} \sum_{i, j=1,2,3} \sigma_{i j} \varepsilon_{i j} \]
形变能量
\[ W = \iiint_{V}w\cdot dV \]
稳定性和不可压性
stabilité & incompressibilité
稳定性
- \(E, \mu \text { et } K\)取正值
- \(3 \lambda+2 \mu>0\)
- \(-1 \leqslant \nu \leqslant 1 / 2 \text {. }\)
不可压性
- \(\lambda \gg \mu \ or \ \nu \rightarrow \frac{1}{2}\)
弹性限制
Von Miss 限制
\[ \sigma_{V M}=\sqrt{\frac{3}{2} \underline{s}: \underline{\underline{s}}} \]
- \(\sigma_{V M} \leqslant \sigma_e\) \(\sigma_e\)为弹性区限制limite du domaine élastique
Tresca 限制
\[ |\tau|_{\max }=\frac{1}{2}\left(\sigma_1-\sigma_3\right) \]
\[ \sigma_T=\left(\sigma_1-\sigma_3\right)=\left(s_1-s_3\right) \leqslant \sigma_e \]
- \(\sigma_T \leqslant \sigma_e\)
Rankine限制
\[ \overline{\bar{\sigma}}=\left[\begin{array}{lll}\sigma & 0 & 0 \\0 & 0 & 0 \\0 & 0 & 0\end{array}\right] \text { avec } \sigma_1=\sigma, \sigma_2=\sigma_3=0 \]
- \(\sigma_1 \leqslant \sigma_r\)