C1 受控系统结构 Structure d’un système asservi
C1 PLAN
- 系统的概念
- 系统建模
- 控制类型
- 受控系统的结构
- 受控系统的性能指标
C1.0 反馈和系统 bouclage et système
反馈 bouclage 在控制中是必要的,它有利于控制系统的
- 精度
précision - 干扰
perturbations - 行为
comportement - 稳定性
stabilité
为此,可以将系统分为两个部分
- 调节系统
régulations旨在将某些物理量保持在固定的常数值。如自动驾驶。 - 跟踪系统
asservissements旨在控制一个或多个物理量跟随一个事先未设定的控制规律。如数控机床。
C1.1 系统的概念 Notion de «système »
动态系统由两种类型的量特征化:输入entrées和输出sorties
。
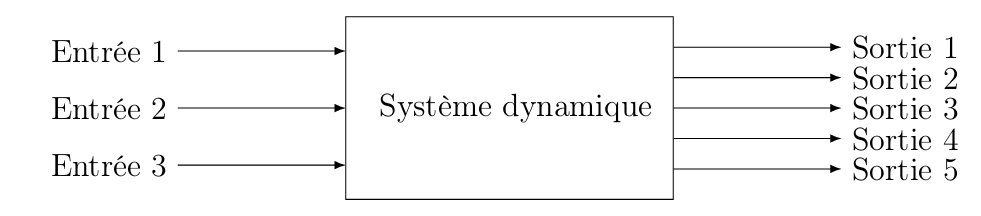
输入可以分为两种类型:控制量grandeurs de commande和干扰信号perturbations。
输出用来评估任务完成质量。
在本课程中考虑的动态系统类别:
- 线性
linéaires或围绕工作点point de fonctionnement线性化的系统 - 不变
invariants的系统,必要时将其动态随时间变化视为扰动
C1.2 系统的建模 Modélisation d’un « système »
受控系统système asservi通常是一个反馈系统système bouclé,包含三个操作:观察observation、反应和动作réflexion ou action
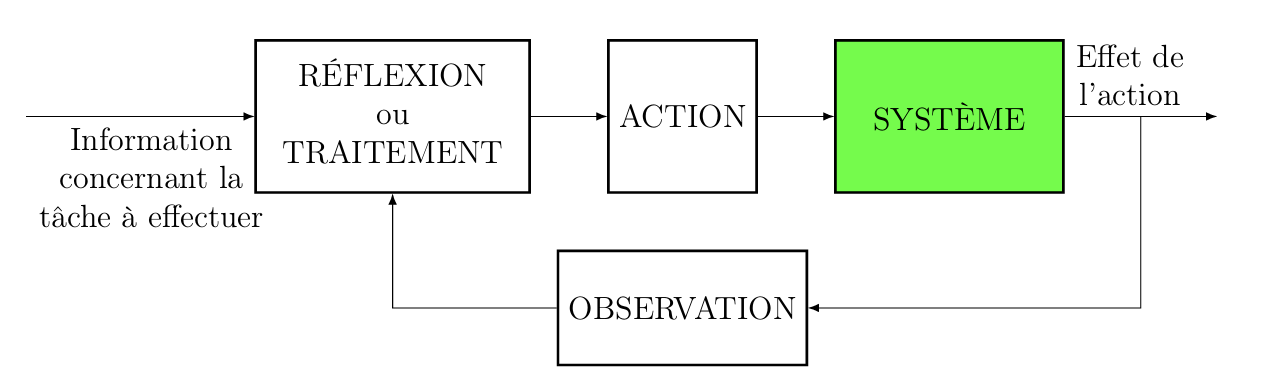
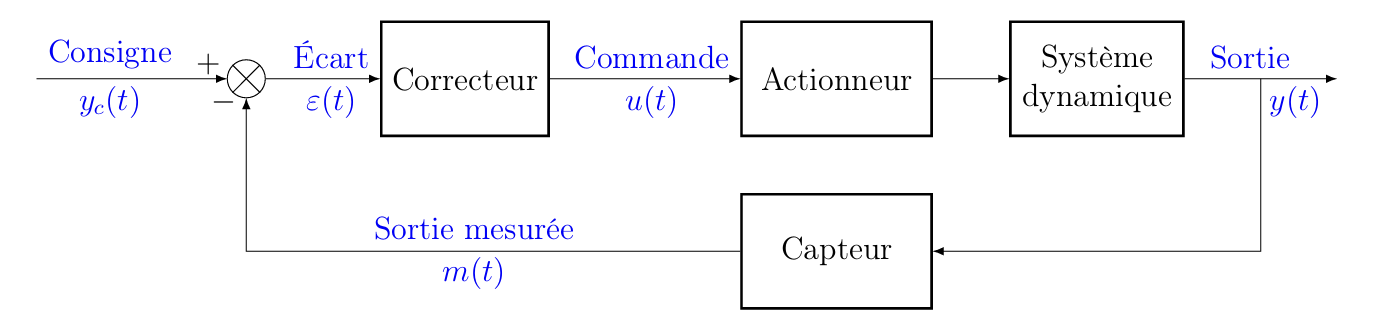
如上图所示,动态系统中可能包含:
- 执行器或动作部件
actionneur ou organe d'action apporte - 传感器
capteur - 偏差信号\(\varepsilon\)
signal d'écart ou signal d'erreur - 比较器
comparateur - 校正器
correcteur- 校正器从偏差信号中生成控制信号,一般为智能部件
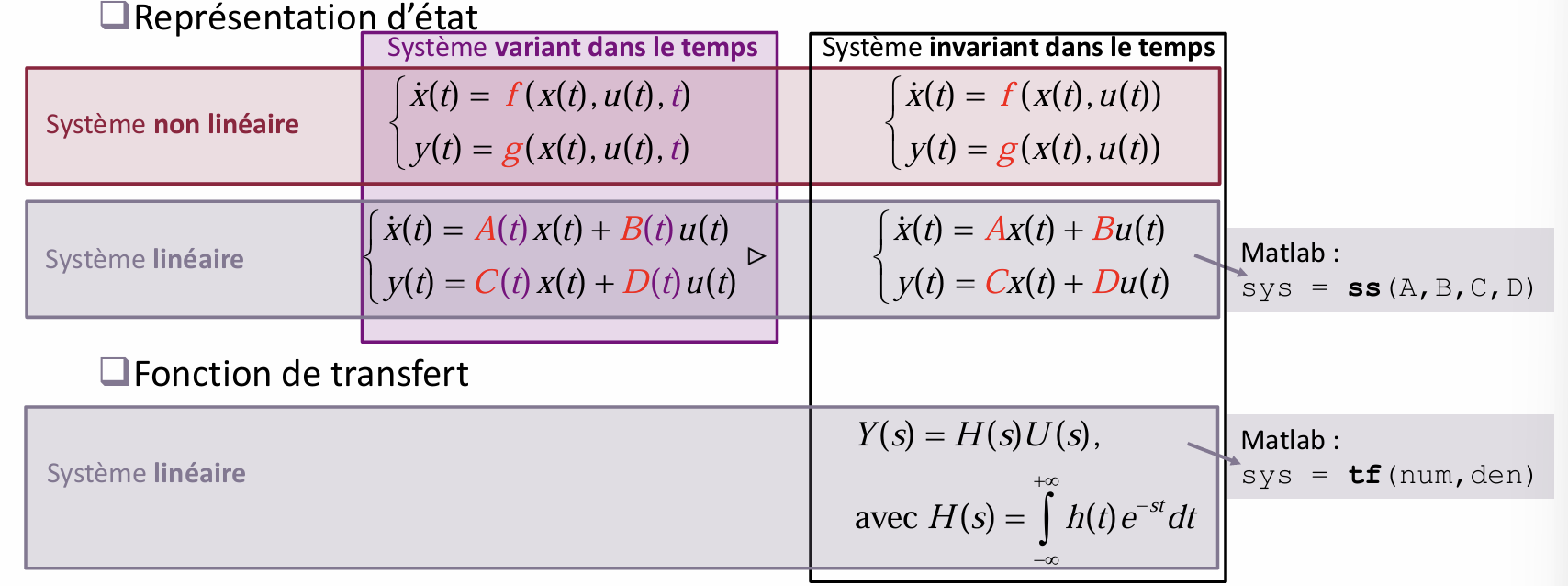
线性系统和非线性系统linéaire/non linéaire
取决于状态空间的微分方程是否为线性。
控制的类型 Types de coommande
- 被动控制
passive****:- 修改系统的性质和结构,应用非常有限
- 示例:柔性结构、振动隔离(抗震系统、声学隔离)
- 开环控制
boucle ouverte:- 通过了解系统和期望的输出,生成需要施加的输入
- 应用:空间轨迹优化、自动开门、洗衣机等
- 效率高度依赖于对系统的了解,不适用于自然不稳定的系统,易受系统随时间的变化和外部干扰影响
- 闭环控制
boucle fermée:- 控制量是根据系统的实际输出来计算的
- 包括反馈的概念
C1.3 主要性能指标 Principaux critères de performance
- 稳定性
stabilité
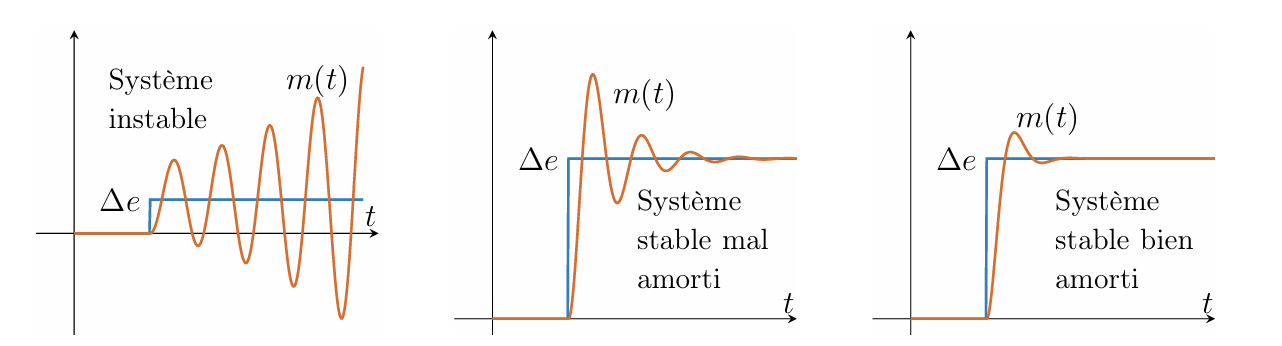
稳定性促使系统在时间上逐渐收束到平衡状态。在实际应用过程中,稳定性一般与阻尼amorti
一起考虑。
- 快速性
rapidité
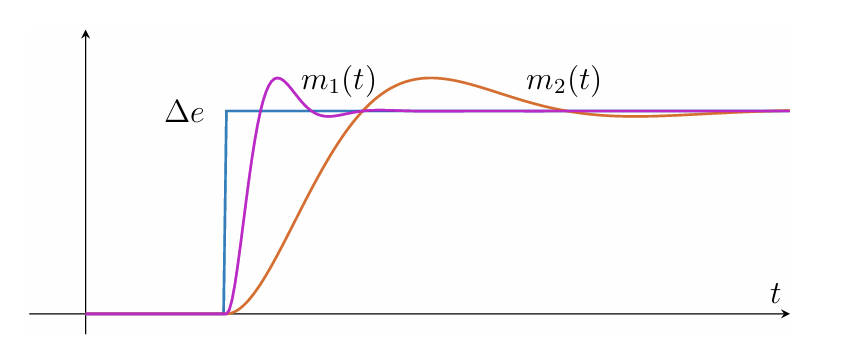
快速性是系统对突变variation brusque做出反应所需要的时间。
- 精度
précision
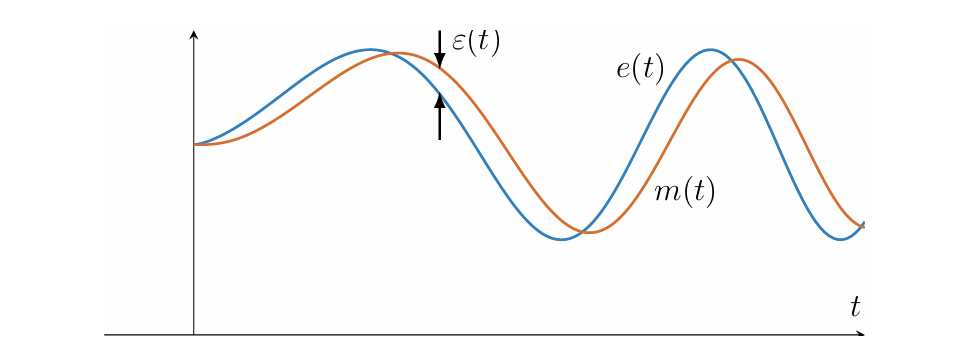
精度是通过输出跟随设定值的误差来表征的。可以用稳态精度en régime permanent
或者瞬时精度en régime transitoire
来表征。前者测量的误差称之为稳态误差erreur statique,后者称之为动态误差erreur dynamique
。
C1.4 工业自动化系统的层级结构
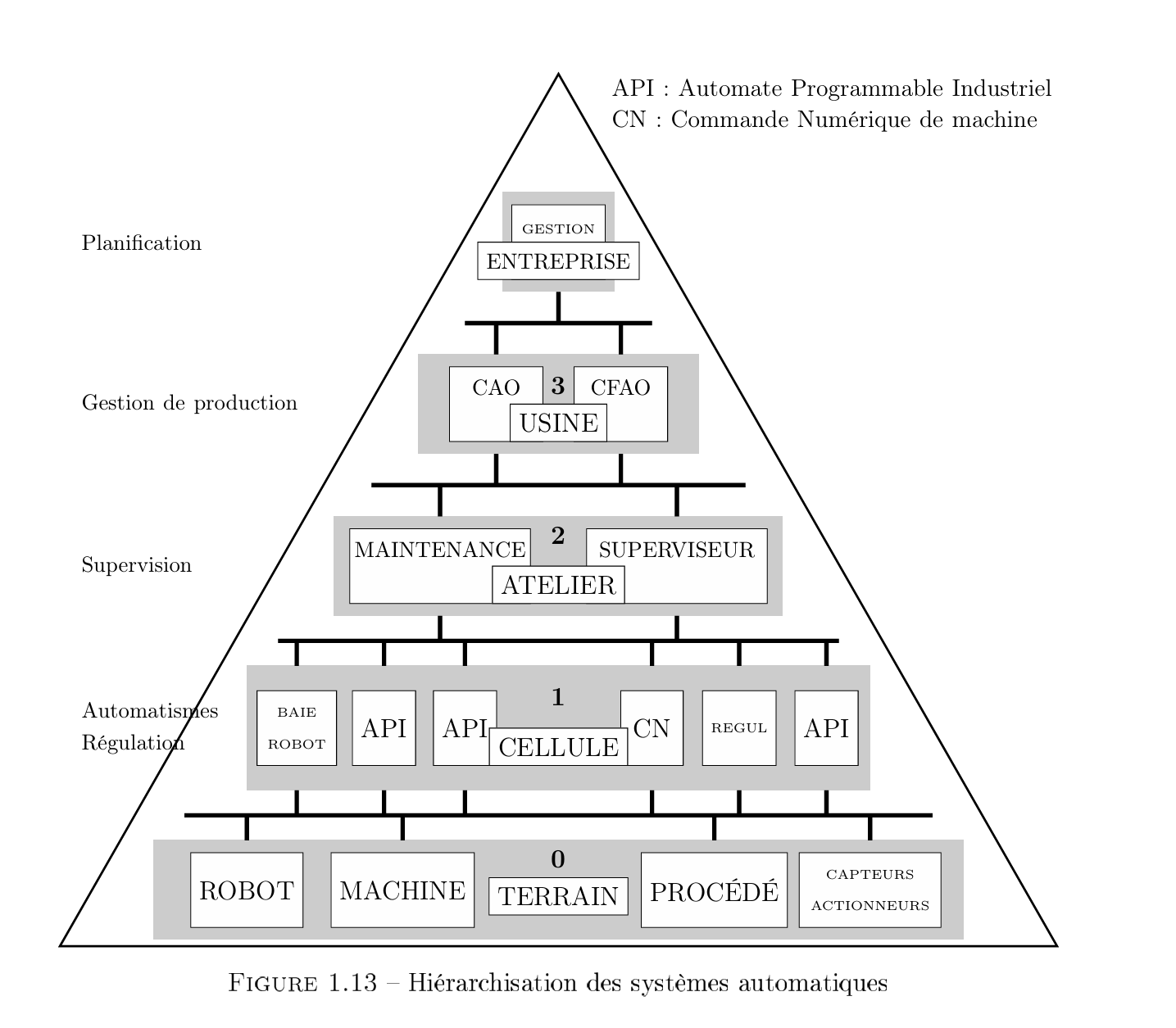
- N0:这个级别不属于控制系统,包含了各种参与生产过程的设备和机器。
- N1:这是辅助控制系统的层级,目标是保持输出在设定值固定不变。在这个层级上,还包括管理生产周期顺序的自动化系统。
- N2:这一层级专门用于多变量控制系统,负责确保下层系统的跟踪和协调。在此层级中,还包括对某个生产单元(如车间)的经济优化策略。与该层级相关的设备通常集中在控制室或操作室内。
- N3:在此层级,提供了整个设备运行的优化功能。第三级中包含了用于生产经济优化的工具(例如CFAO工具:计算机辅助设计与制造)。
- N4:每个现代企业都会实施优化策略,其中包括生产工具的规划。这一功能处于第4级,位于金字塔的顶端。
本博客所有文章除特别声明外,均采用 CC BY-NC-SA 4.0 许可协议。转载请注明来自 Raphael's Home!
相关推荐